
”KITTI 激光雷达点云“ 的搜索结果
1、在anaconda环境下: ...2、点云的读取和显示 import os import numpy as np import struct import open3d def read_bin_velodyne(path): pc_list=[] with open(path,'rb') as f: content=f.read() pc_iter
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达本次推送给大家带来的是一种激光雷达和相机的外参标定方法,主要利用了ROS中 dynamic_reconfigure 功能包提供的动态...
本博客针对基于投影方法的激光雷达点云语义分割的经典模型之一:RangeNet++的复现

KITTY数据集包含在城市环境下采集的多模态传感器数据,包括图像、激光雷达点云、GPS/IMU定位数据等。这些数据可用于许多计算机视觉任务,如目标检测、语义分割、立体视觉等。 KITTY数据集的图像数据包含了多个...
KITTI数据集之点云地图构建
标签: 自动驾驶
参考链接 1、坐标系的转换 2、KITTI数据集数据初体验 一、点云建图效果 图1 odometry数据集07
一、velodyne-VLP16使用教程 推荐网址: http://blog.csdn.net/littlethunder/article/details/51920681 https://www.cnblogs.com/williamc17/p/9705492.html 更多情报: ...1)作者J Zhang,...
一、velodyne-VLP16使用教程 推荐网址: http://blog.csdn.net/littlethunder/article/details/51920681 ... 源于用户手册的情报: 非常重要的一点:velodyne-VLP16的ros-d...

KITTI数据集简析
标签: 自动驾驶



KITTI 相关信息汇总
标签: 自动驾驶


同样的在数据处理的过程中,在生成基本的 pkl 文件后,还需要将其转换为 coco 标注格式的 json 文件,...,由于室内点云较为密集的特点,通常会进行点云的下采样处理,保存在。,我们会借助 pkl 文件的信息进一步提取。
ICCV和CVPR是两大顶尖国际计算机视觉会议,ICCV2019有哪些研究成果呢?ICCV每两年举行一次,今年是在韩国首尔举行,共提交了1076篇论文。... 简介:腾讯和香港大学联合发表的论文基于KITTY提出了一...
KITTI数据集解读
标签: 自动驾驶


【3D目标检测】KITTI数据集
标签: 3d

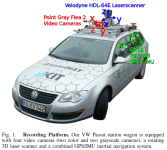
摘要:本文融合了Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite和Vision meets Robotics: The KITTI Dataset两篇论文的内容,主要介绍KITTI数据集概述,数据采集平台,数据集详细描述,...

该数据集包含丰富多样的传感器数据(有双目相机、64线激光雷达、GPS/IMU组合导航定位系统,基本满足对图像、点云和定位数据的需求)、大量的标定真值(包括检测2D和3D包围框、跟踪轨迹tracklet)和官方提供的一些...


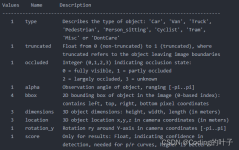
kitti数据集label解析_hhhhhhzb的博客-CSDN...Don’t care 是没有3D标注的,原因是雷达扫不了那么远,即使可以视觉检测出来)第2列0.0表示其是否被截断的程度为0。(如果车在图片边缘,那么就有可能发生部分被截断的


推荐文章
- 联邦学习综述-程序员宅基地
- virtuoso--工艺库答疑_tsmc mac-程序员宅基地
- C++中的exit函数_c++ exit-程序员宅基地
- Java入门基础知识点总结(详细篇)_java基础知识重点总结-程序员宅基地
- 【SpringBoot】82、SpringBoot集成Quartz实现动态管理定时任务_springboot集成quratz 实现动态任务调度-程序员宅基地
- testNG常见测试方法_idea_java_testng 测试-程序员宅基地
- Debian11系统安装-程序员宅基地
- Centos7重置root用户密码_centos7更改root密码-程序员宅基地
- STM32常用协议之IIC协议详解_正点原子stm32 iic-程序员宅基地
- 【视频播放】Jplayer视频播放器的使用_jplayer 播放amr-程序员宅基地